
Maanit Sharma

I'm a Freshman at University of California Berkeley, Berkeley, CA, pursuing a bachelor’s degree in Electrical Engineering and Computer Sciences. I am interested in robotics engineering, programming, machine learning, and data modeling.
Build, wire, and program an autonomous robotic car for line following, object avoidance, object tracking/following, and specific distance/path driving using various sensors and other feedback mechanisms.
Programming Language: Python 3
Micro-controller: Raspberry Pi 3 Model B+
Motor-controller: Gowoops stepper motor hat
Line Following: Optical sensors
Pan-Tilt Mechanism: SG90 9G servo motors
Avoid Wall: HCSR04 sensors (ultrasonic sensors)
Object Tracking and Following: Raspberry Pi Camera Module V2, Pan-Tilt Mechanism
Specific Distance/Path Driving: LM393 speed sensor (Encoders) and PID control


Design, build and wire my robotic's team intake mechanism with a single motor system, GT2 pulleys and belts, six 2in wheels, two 4 in compliant wheels, two 30tooth gears, and polycarbonate to minimize weight as much as possible since we would have this intake on an elevator mechanism that could only lift a low-weight intake.
CAD Application: Solidworks
Motor: One 775Pro
Gearbox: Versaplanatory Gearbox - 10: 1 Gear Ratio, 18730 RPM
Ball Detection: Limit Switch
Modelling Competitions

Model the impacts of a ban on the scale of single-serving water bottles in a town or city and apply the model to Town of Concord and the City of San Francisco.(2019)
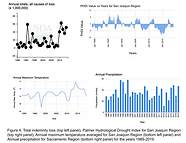

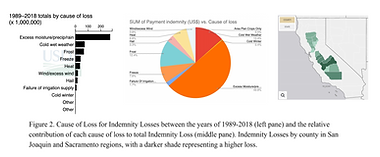
Effects of Future Climate Change on Almonds in the California Central Valley: Insurance Loss Projections and Risk Mitigations